所属と氏名/Biography
- 所属: 国立大学法人 長岡技術科学大学 技学研究院 電気電子情報系 准教授
- 氏名: 横倉 勇希
- Name: Associate Prof. Ph.D. Yokokura, Yuki
- Affiliation: Dept. of Electrical, Electronics and Information Engineering, Nagaoka University of Technology, National Univ. Corp.

1984年生。2009年3月長岡技術科学大学大学院電子情報工学専攻修士課程修了。 同年4月より慶應義塾大学大学院理工学研究科総合デザイン工学専攻後期博士課程入学、2011年3月修了。 2010年4月から2011年8月まで日本学術振興会特別研究員(DC2およびPD)。 2011年4月慶應義塾大学理工学部訪問研究員、同年9月長岡技術科学大学電気系博士研究員、2012年4月より同大学助教、2020年9月より同大准教授、現在に至る。 主としてモーションコントロール、モータドライブ、ロボティクスに関する研究に従事。博士(工学)。→ 履歴書風の表示
Yuki Yokokura received the B.E. and M.E. degrees in electrical engineering from the Nagaoka University of Technology, Nagaoka, Japan, in 2007 and 2009, respectively, and the Ph.D. degree in integrated design engineering from Keio University, Yokohama, Japan, in 2011. He was a Visiting Fellow with Keio University, and a Postdoctoral Fellow with Nagaoka University of Technology in 2011. Dr. Yokokura was a Japan Society for the Promotion of Science Research Fellow from 2010 to 2011. He was an Assistant Professor with Nagaoka University of Technology from 2012 to 2020, and he has been an Associate Professor in 2020.
戦闘力
- h-index : 18 (Scopus)
- 全被引用数 : 1142 (Scopus)
- 最大Impact Factor : 7.168
連絡先
- 住所:〒940-2188 新潟県長岡市上富岡町1603-1
- Email:

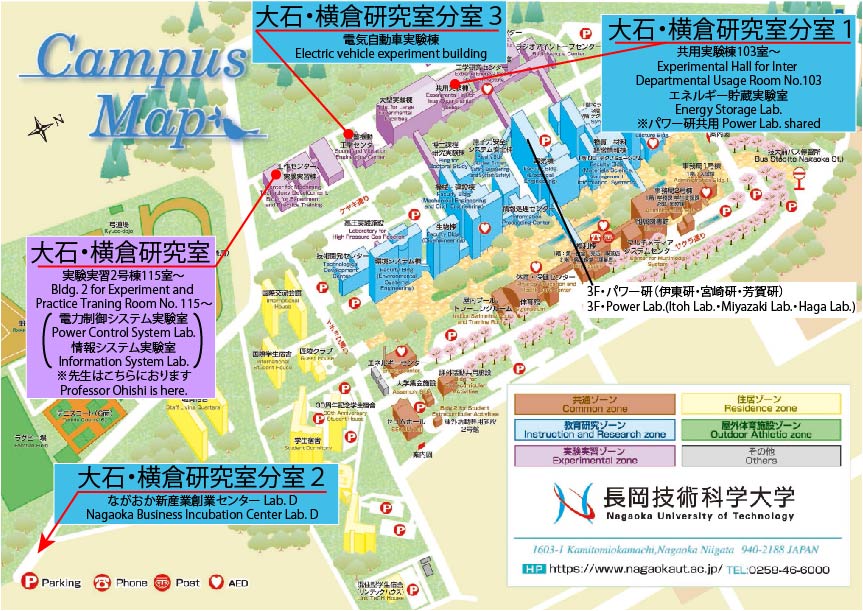
- 居室:長岡技術科学大学 実験実習2号棟 115号室(構内地図)
{kind=link}
所属学会
- 電気学会(IEEJ)、産業応用部門(D部門)
- Institute of Electrical and Electronics Engineers(IEEE), Industrial Electronics Society(IES), Robotics and Automation Society(RAS)
- 日本ロボット学会(RSJ)
- (SICE系、機会学会系にもたまに出現)
研究分野
モーションコントロール、パワーエレクトロニクス、メカトロニクス、ロボティクス、ハプティクス、制御工学
使用言語
VHDL(Altera,Intel), アセンブリ(Z80,PIC,dsPIC,8086), C/C++(Linux), C++/CLI(Win), MATLAB mスクリプト, Borland C++, N88 BASIC, QBASIC, Visual Basic 6.0/.NET, PHP, perl, JavaScript, MS-DOS bat, Linux shell script, HTML, TeX, LaTeX, 日本語, 英語, アーヴ語
お気に入りソフトウェア
MATLAB/Simulink, KiCAD, Solid Edge、Intel Quartus prime, ModelSim, Illustrator, Maxima、LTspice, VSCode, サクラエディタ, Sylpheed等々
主な研究内容
- 2慣性共振系の「負荷側加速度制御」、力制御、高バックドライバブル制振制御
- 加速度制御に基づくロボットの力制御
- 減速機&オイルシール付きサーボモータのバックドライバビリティ向上手法
- ねじれトルクセンサベースのバイラテラル制御
- 実世界任意物体の感触の保存と再現
- モーションコピーシステムによる人間の動作の保存と再現
- ダイオードクランプリニアアンプによる超広帯域・電流制御&力制御&モーションコントロール
- ロボット制御用の広帯域電流制御
- 人間に優しい安全なロボット
技術的スキル
- 1自由度モータシステム機構設計&製作
- 多自由度ロボット機構設計&製作
- パワエレ回路設計&製作
- アナログ/デジタル回路設計&基板設計&基盤製造&製作
- FPGA(Altera,Intel)への制御系実装
- PCI Expressインタフェースボードの自作 & Linux用ドライバ実装
- PC(x86)下位レベルソフトウェア実装
- 固定小数点(Qフォーマット)制御系実装
- 古典制御&現代制御 制御系設計&実装
- Ethernet, TCP/IP, ソケット通信実装
- 永久磁石同期モータの制御系実装
- 独自通信プロトコルの仕様策定と実装
- Linux上でのロボット制御ソフトウェア開発 (例:ARCS6 などなど)
- Webサーバ、メールサーバ等々の構築&管理
- ホイールローダ(ブルドーザ)、バックホウ(パワーショベル)の運転
資格
- 第四級アマチュア無線技士
- アナログ第2種 工事担任者
- 特別教習修了証 小型車両系建設機械(整地等) (3トン未満)
趣味

- 剣道初段、野球(左投左打、一塁か外野)
- 夏の登山
- スーパーカブの自前整備
- 航空機、ロケット、宇宙、物理、SF、ボカロ
- DCS: A-10C
- DCS: F/A-18C
- Kerbal Space Program
- 猫
夢
- 火星でロボットメーカを創業する。(重力は地球の4割!)
- アルファ・ケンタウリに行く。
SWL - The Side Warehouse Laboratory, 横倉研究室 - 技術倉庫
Copyright(C), The Side Warehouse Laboratory, All rights reserved.