 |
ARCS6 AR6-REV.24062600
|
読み取り中…
検索中…
一致する文字列を見つけられません
|
ARCS6 AR6-REV.24062600
|
Advanced Robot Control System V6, ARCS6 [詳解]
#include <unistd.h>#include "ARCScommon.hh"#include "ARCSscreen.hh"#include "ARCSthread.hh"#include "ARCSeventlog.hh"#include "ARCSassert.hh"#include "ARCSprint.hh"#include "ARCSparams.hh"#include "ARCSscrparams.hh"#include "ARCSgraphics.hh"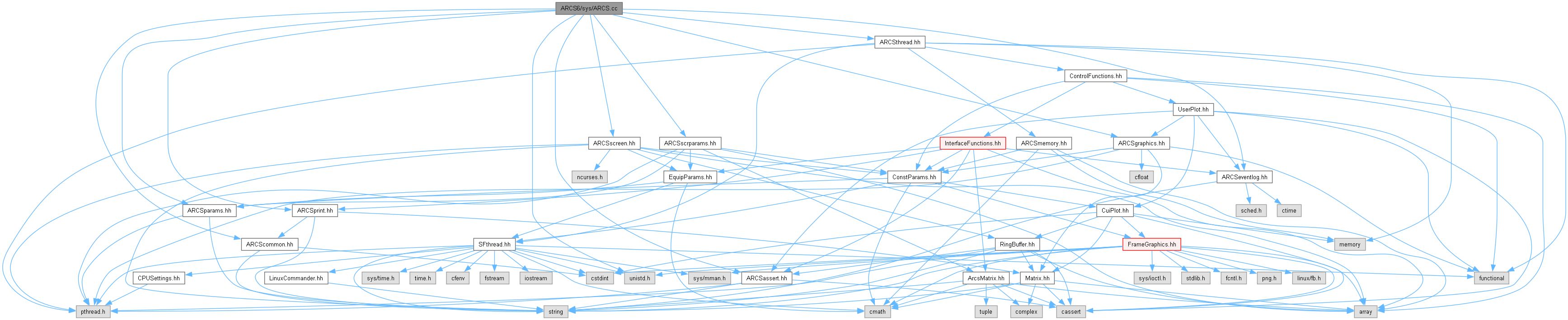
関数 | |
| int | main (void) |
| ARCS エントリポイント | |
Advanced Robot Control System V6, ARCS6
Copyright (C) 2011-2024 Yokokura, Yuki MIT License. For details, see the LICENSE file.